Ljudima je prilično uobičajeno - posebno onima koji rade u proizvodnji - vezati čvor, skinuti kućište s kabela, umetnuti iglu u rupu ili koristiti ručni alat poput bušilice. Oni mogu izgledati kao jednostavni zadaci, ali su zaista vrlo složeni i uključuju izuzetno fine pokrete prstiju i ruku.
Povezani sadržaj
- Kako su roboti napustili laboratorij i započeli pomagati ljudima
Iako se roboti sve više uključuju u rad u tvornici i u širokom rasponu drugih vrsta poslova - uključujući uslužnu industriju i zdravstvo - njihova spretnost nije ni približno impresivna. Budući da su ih ljudi prvi put doveli na rad u tvornicama automobila prije više od 50 godina, izradili smo robote koji mogu prilično dobro zavarivati, slikati i sastavljati dijelove. Današnje najbolje robotske ruke mogu pokupiti poznate predmete i premjestiti ih na druga mjesta - poput uzimanja proizvoda iz spremnika i stavljanja u kutije.
Ali roboti ne mogu pravilno usmjeriti ručni alat - recimo, postavljanje odvijača glave Phillipsa s utorima na vijaku ili ciljati čekićem za nokat. I definitivno ne mogu detaljno koristiti dvije ruke, poput zamjene baterija na daljinskom upravljaču.
Ljudske ruke su izvrsne u tim zadacima i puno više. Da bi se još više približili onome za što su naše ruke lako sposobne, rukama robota potrebna je bolja okretnost, pouzdanost i snaga - i oni moraju biti u stanju preciznije osjetiti i kretati se još preciznije nego sada, da shvate što čine ' zadržavanje i kako ga najbolje prikriti. Da bi roboti mogli raditi zajedno s ljudima, morat ćemo smisliti kako napraviti robote koji nam mogu doslovno pružiti ruku kada naša dva nisu dovoljna.
Moja istraživačka grupa na Sveučilištu Northeastern radi upravo na tome, posebno na humanoidnim robotima poput NASA-inog Valkyrie-a koji na svakoj ruci ima tri prsta i palac. Svaka znamenka ima zglobove nalik na zglobove, a svaka ruka ima ručni zglob koji se može lako okretati. Radimo na stvaranju pokreta - kombinacije pokreta ruke, zapešća, prsta i palca koji zajednički ostvaruju zadatak, poput pomicanja ključa u krugu za zatezanje vijaka ili povlačenja kolica s jednog mjesta na drugo.
 Svaki od ovih industrijskih robota ima više specijaliziranih alata. Mogle bi mnoge svoje zadatke obaviti robotske ruke? (Steve Jurvetson / flickr, CC BY)
Svaki od ovih industrijskih robota ima više specijaliziranih alata. Mogle bi mnoge svoje zadatke obaviti robotske ruke? (Steve Jurvetson / flickr, CC BY) Važnost ruku
Umjesto da svaki robot napravi prilagođeni stroj prilagođen specifičnom zadatku, moramo dizajnirati višenamjenske robove, ili čak takve sposobne strojeve koji bi se mogli nazvati "općom namjenom" - dobro za gotovo svaki zadatak. Ključ uspjeha ove vrste robota bit će izvrsne ruke.
Naš rad fokusiran je na dizajniranju nove klase prilagodljivih ruku robota sposobnih za precizne fine pokrete i autonomno hvatanje. Kad roboti budu u stanju da se zabiju u čavle, promijene baterije i izvrše druge slične pokrete - osnovne za ljude, ali vrlo složene za robote - bit ćemo u stanju da u čovjekovoj spretnosti robotiziramo.
Postizanje ovog cilja uključuje i pronalazak novih dizajna koji uključuju tvrde i meke elemente - na način na koji ljudska kost daje čvrstoću stisku, a koža širi pritisak tako da se čaša vina ne razbije.
Brži razvoj i testiranje
Moderna tehnološka poboljšanja olakšavaju razvojni proces. Pomoću 3D ispisa vrlo brzo možemo napraviti prototipove. Čak možemo napraviti jeftine komponente za jednokratnu upotrebu kako bismo isprobali različite mehanizme mehanizama, poput dvostrukih ili trostranih hvataljki za jednostavne zadatke odabira i mjesta ili antropomorfnih ruku robota za osjetljivije operacije.
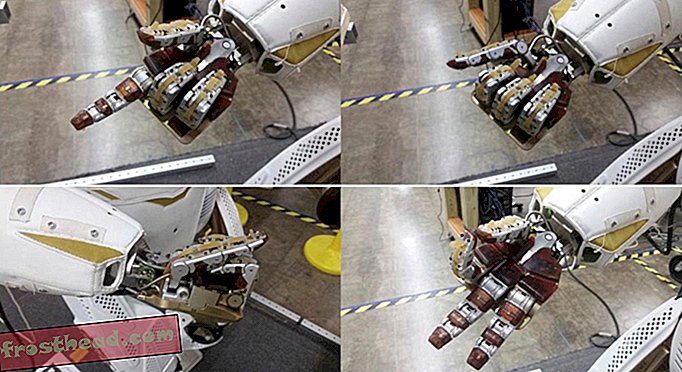 Različite vrste ruku na NASA-inom robotki Valkyrie. (Sveučilište Northeastern, CC BY-ND)
Različite vrste ruku na NASA-inom robotki Valkyrie. (Sveučilište Northeastern, CC BY-ND) Kako se elektronički fotoaparati i senzori smanjuju, mi ćemo ih moći integrirati na nove načine. Na primjer, ako u robotsku ruku stavimo senzore tlaka i fotoaparate, oni mogu dati povratne informacije kontroloru robota (bilo da je čovjek ili automatiziran) kada je stisak siguran ili ako nešto počne kliznuti. Jednog dana možda će moći osjetiti u kojem se smjeru klizni objekt kreće, pa ga robot može uhvatiti.
Ove su sposobnosti za ljude već druga priroda kroz vid i propriocepciju (sposobnost da se osjete relativni položaji dijelova tijela bez da se gleda ili razmišlja o tome). Jednom kad ih uspijemo postići u robotima, oni će moći raditi stvari poput otkrivanja je li jaka čvrstoća i previše steže predmet.
Planiranje koordiniranih pokreta
Sljedeća prekretnica bit će razvoj metoda za robote kako bi shvatili koje pokrete trebaju napraviti u stvarnom vremenu, uključujući osjetiti što se događa u njihovim rukama svakog trenutka. Ako ruka robota može otkriti promjene u objektima kojima rukuje ili manipulirati predmetima dok ih drži, oni bi mogli pomoći u onim uobičajenim ručnim zadacima poput vezanja čvorova i uklanjanja žica.
Rad s dvije ruke zajedno je još dalje u budućnosti, iako bi dao značajan poticaj, posebno za proizvodnju. Robot koji može upravljati bušilicom s dvije ruke ili prosljeđivati dijelove stroja iz jedne ruke u drugu bila bi velika poboljšanja, koja bi tvornicama omogućila još više koraka u svojim procesima.
 Je li ovo robot budućnosti? (NASA)
Je li ovo robot budućnosti? (NASA) Mi ljudi još nismo razvili ove sustave. Postizanje ljudske autonomne spretnosti robota zadržat će istraživače, tehnologe i inovatore robotike u doglednoj budućnosti. To neće usporiti tekuću revoluciju robotike u proizvodnji, jer trenutni procesi još uvijek imaju puno prostora za automatizaciju za poboljšanje sigurnosti, brzine i kvalitete. No kako budu roboti još bolji, oni će nam moći pružiti ruku.
Ovaj je članak prvotno objavljen u časopisu The Conversation.
Taskin Padir, izvanredni profesor za elektrotehniku i računalno inženjerstvo na Sveučilištu Northeastern