Novi robot kreće se preko neravne površine na način koji je oblikovan prema gušteru od zebre. Ljubaznošću Chen Li-a, Tingnana Zhang-a, Daniela Goldmana
Projektiranje robota koji se lako može kretati po labavom terenu - recimo, rover namijenjen zaobilaziti površinu Marsa - predstavlja jedinstveni inženjerski izazov: Kotači obično utonu u ono što inženjeri nazivaju „tečna zemlja“ (mješavine pijeska, zemlje, blata i trave ).
S obzirom na mnogobrojne biološki nadahnute inovacije robotike, tim istraživača iz Georgia Tech-a imao je ideju - osnovati dizajn na pustinjskim bićima poput zebre-repom guštera koji se mogu prevrtati preko labave pješčane površine bez usporavanja. Njihovi napori omogućili su im stvaranje ovog malog uređaja sa šest nogu, predstavljenog u članku danas objavljenom u Scienceu, koji može proći preko zrnate površine na način koji nalik reptilu podsjeća na gmaza.
Istraživački tim, pod vodstvom Chen Li-a, dizajnirao je uređaj nakon proučavanja kretanja različitih stvorenja i matematički simulirajući performanse različitih vrsta nogu (različitih brojeva, oblika i dužina) u nekoliko različitih okruženja. Nadaju se da će njihova istraživanja potaknuti razvoj polja koje su nazvali „terradinamika“ - jednako kao što se aerodinamika brine o performansama krilatih vozila u zraku, njihovo će polje proučavati kretanje nogu na granuliranim površinama.
Da bi dizajnirali svog robota, koristili su ove simulacije za određivanje točnih duljina nogu, brzine kretanja i stupnja sile koji će pokretati uređaje preko labave površine bez da se naduvaju previše duboko. Potom su ispisali razne vrste nogu pomoću 3D pisača i ugradili robote kako bi ih testirali u laboratoriju.
Jedno od njihovih najzanimljivijih otkrića je da iste vrste principa dizajna primjenjuju se na kretanje na raznim granuliranim površinama, uključujući sjemenke maka, staklene kuglice i prirodni pijesak. Njihove simulacije i eksperimenti u stvarnom svijetu otkrili su da noge u obliku slova C općenito najbolje funkcioniraju, ali da bilo koja vrsta udova u obliku luka djeluje relativno dobro, jer širi težinu uređaja po dugim (iako uskim) površinama nogu dok noge dolaze u dodiru sa zemljom tijekom napretka.

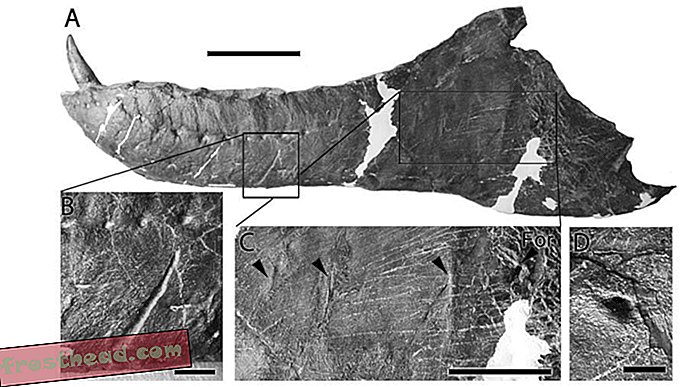
Istraživači su otkrili da udovi u obliku slova C najbolje djeluju za brzo kretanje preko zrnatih površina, kako kod guštera, tako i kod robota. Crtani, čvrsti i isprekidani prikazi na C i D rani su, srednji i kasni položaji nogu tijekom napretka. Strelice označavaju smjerove kretanja za određene regije nogu. Slika putem Science / Li et. dr.
Primjene ove vrste istraživanja su široke: Ovaj se robot, kažu istraživači, može razviti u koristan uređaj za traženje i spašavanje ili izviđanje, dok bi principi izvedeni iz područja terradinamike mogli biti korisni u dizajniranju sondi za istraživanje drugih planete u budućnosti. Oni bi također mogli pomoći biolozima da bolje razumiju kako su se životni oblici ovdje na zemlji razvijali kako bi se kretali po površini našeg planeta.